Slopemow
Just click START REMOTE, connect and go!
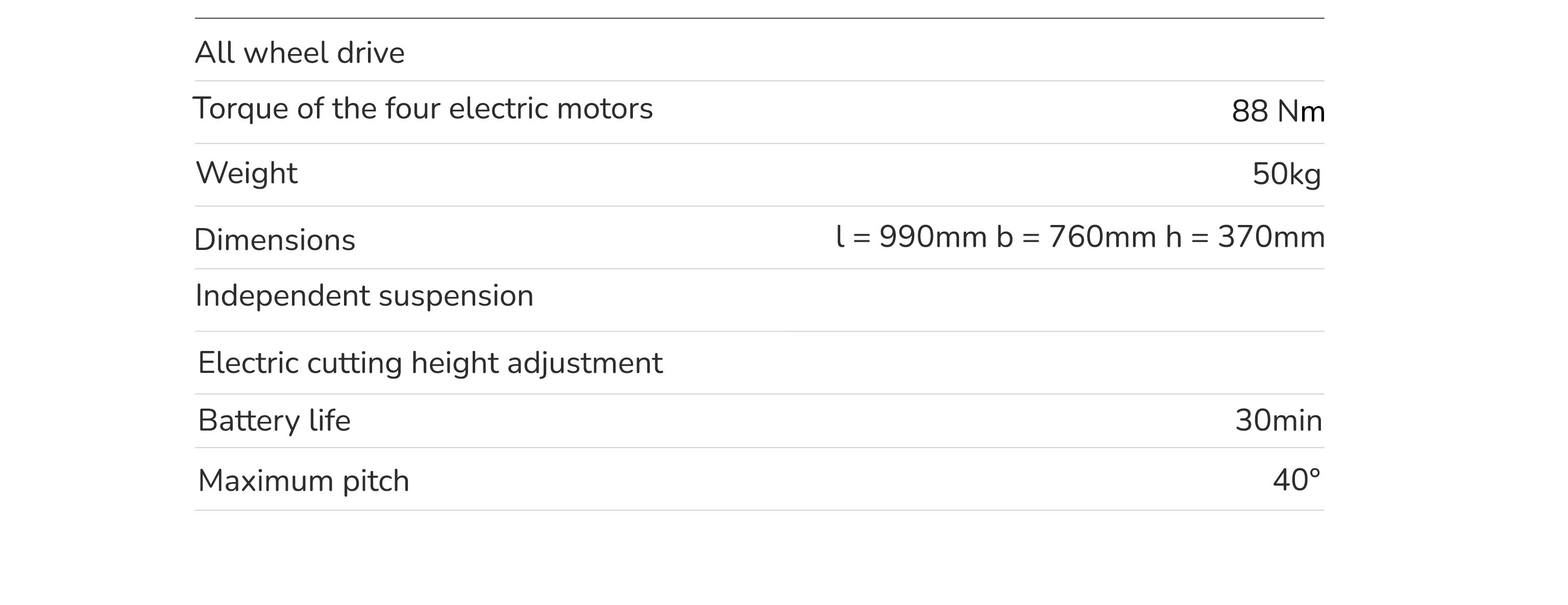
Technical specifications


Just click START REMOTE, connect and go!
Building progress: 100%


Team SLOPEMOW
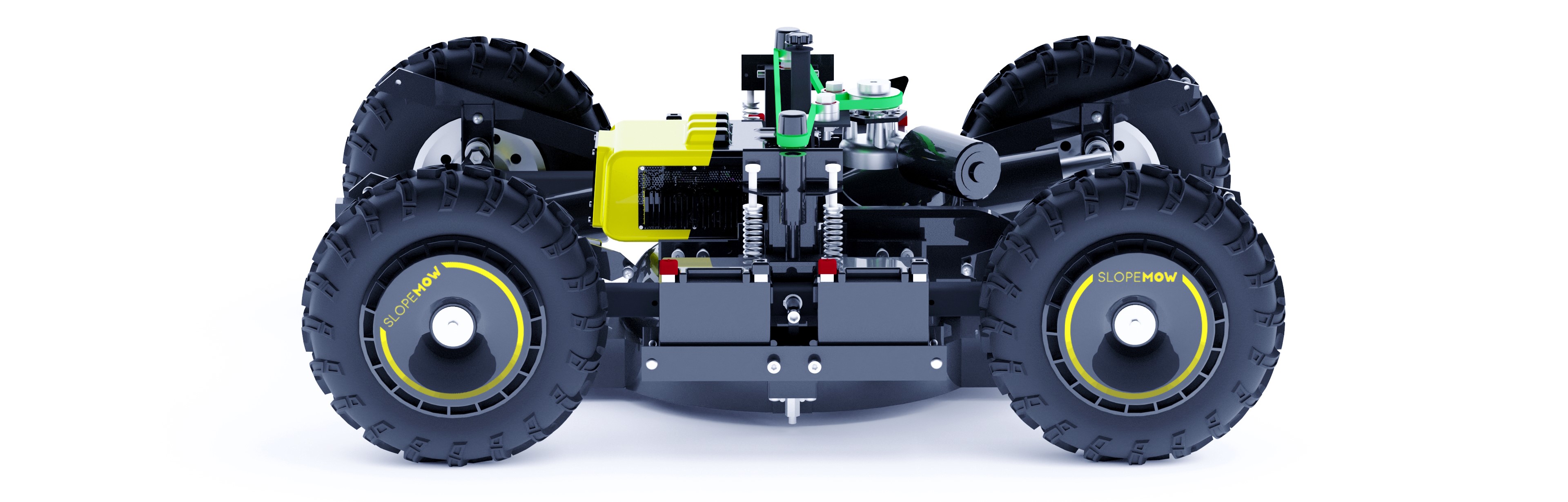
Juan Carlos Sandler developed the construction of SLOPEMOW and built the raw chassis with the drive
train and the other mechanical attachment parts.
e-mail: juan.sandler@htlstp.at

Andreas Nagl is responsible for stability calculations and construction of the remote control.
Furthermore, he is in charge of budget and cost calculations.
e-mail: andreas.nagl@htlstp.at

His job was to design the mower and the remote. In addition, he made the surface model of the 3D CAD.
The
control system of the mower was also programmed by Florian Ritzmaier.
e-mail: florian.ritzmaier@htlstp.at


Responsible for content: Florian Ritzmaier Contact: florian.ritzmaier@htlstp.at